MedianComparison
Repository source: MedianComparison
Description¶
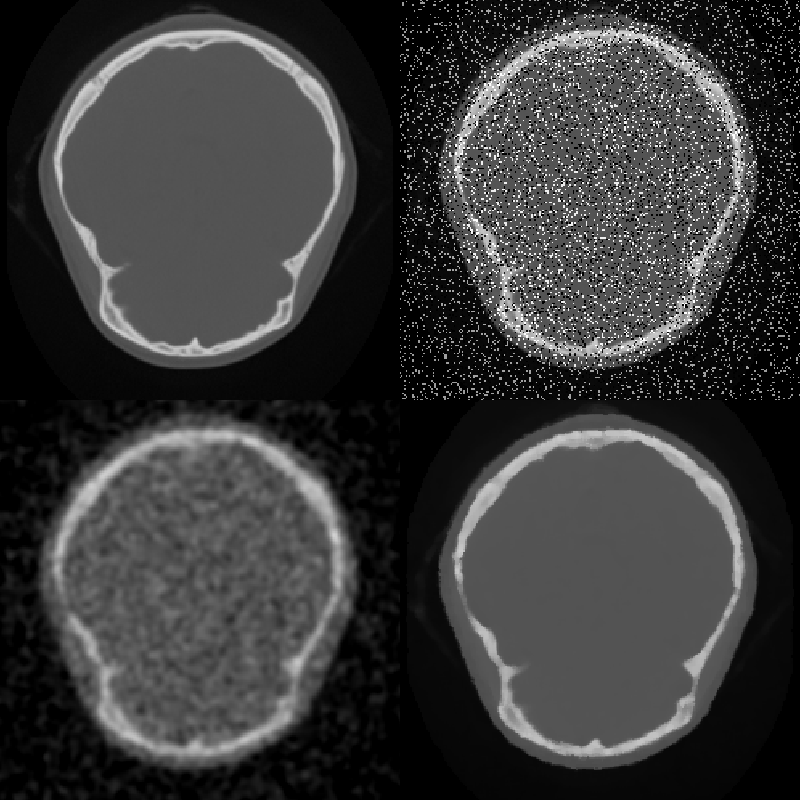
Comparison of Gaussian and Median smoothing for reducing low-probability high-amplitude noise.
Info
See this figure in Chapter 10 the VTK Textbook.
Other languages
See (Cxx)
Question
If you have a question about this example, please use the VTK Discourse Forum
Code¶
MedianComparison.py
#!/usr/bin/env python3
# noinspection PyUnresolvedReferences
import vtkmodules.vtkRenderingOpenGL2
from vtkmodules.vtkCommonDataModel import vtkImageData
from vtkmodules.vtkIOImage import vtkImageReader2Factory
from vtkmodules.vtkImagingCore import (
vtkImageBinaryThreshold,
vtkImageCast
)
from vtkmodules.vtkImagingGeneral import (
vtkImageGaussianSmooth,
vtkImageMedian3D
)
from vtkmodules.vtkImagingMath import vtkImageMathematics
from vtkmodules.vtkImagingSources import vtkImageNoiseSource
from vtkmodules.vtkInteractionStyle import vtkInteractorStyleImage
from vtkmodules.vtkRenderingCore import (
vtkImageActor,
vtkRenderWindow,
vtkRenderWindowInteractor,
vtkRenderer
)
def main():
# colors = vtkNamedColors()
file_name = get_program_parameters()
# Read the image.
readerFactory = vtkImageReader2Factory()
reader = readerFactory.CreateImageReader2(file_name)
reader.SetFileName(file_name)
reader.Update()
scalar_range = [0] * 2
scalar_range[0] = reader.GetOutput().GetPointData().GetScalars().GetRange()[0]
scalar_range[1] = reader.GetOutput().GetPointData().GetScalars().GetRange()[1]
print("Range:", scalar_range)
middle_slice = (reader.GetOutput().GetExtent()[5] - reader.GetOutput().GetExtent()[4]) // 2
# Work with double images
cast = vtkImageCast()
cast.SetInputConnection(reader.GetOutputPort())
cast.SetOutputScalarTypeToDouble()
cast.Update()
original_data = vtkImageData()
original_data.DeepCopy(cast.GetOutput())
noisyData = vtkImageData()
add_shot_noise(original_data, noisyData, 2000.0, 0.1, reader.GetOutput().GetExtent())
median = vtkImageMedian3D()
median.SetInputData(noisyData)
median.SetKernelSize(5, 5, 1)
gaussian = vtkImageGaussianSmooth()
gaussian.SetDimensionality(2)
gaussian.SetInputData(noisyData)
gaussian.SetStandardDeviations(2.0, 2.0)
gaussian.SetRadiusFactors(2.0, 2.0)
color_window = (scalar_range[1] - scalar_range[0]) * 0.8
color_level = color_window / 2
original_actor = vtkImageActor()
original_actor.GetMapper().SetInputData(original_data)
original_actor.GetProperty().SetColorWindow(color_window)
original_actor.GetProperty().SetColorLevel(color_level)
original_actor.GetProperty().SetInterpolationTypeToNearest()
original_actor.SetZSlice(middle_slice)
noisy_actor = vtkImageActor()
noisy_actor.GetMapper().SetInputData(noisyData)
noisy_actor.GetProperty().SetColorWindow(color_window)
noisy_actor.GetProperty().SetColorLevel(color_level)
noisy_actor.GetProperty().SetInterpolationTypeToNearest()
noisy_actor.SetZSlice(middle_slice)
gaussian_actor = vtkImageActor()
gaussian_actor.GetMapper().SetInputConnection(gaussian.GetOutputPort())
gaussian_actor.GetProperty().SetColorWindow(color_window)
gaussian_actor.GetProperty().SetColorLevel(color_level)
gaussian_actor.GetProperty().SetInterpolationTypeToNearest()
gaussian_actor.SetZSlice(middle_slice)
median_actor = vtkImageActor()
median_actor.GetMapper().SetInputConnection(median.GetOutputPort())
median_actor.GetProperty().SetColorWindow(color_window)
median_actor.GetProperty().SetColorLevel(color_level)
median_actor.GetProperty().SetInterpolationTypeToNearest()
median_actor.SetZSlice(middle_slice)
# Setup the renderers.
original_renderer = vtkRenderer()
original_renderer.AddActor(original_actor)
noisy_renderer = vtkRenderer()
noisy_renderer.AddActor(noisy_actor)
gauss_renderer = vtkRenderer()
gauss_renderer.AddActor(gaussian_actor)
median_renderer = vtkRenderer()
median_renderer.AddActor(median_actor)
renderers = list()
renderers.append(original_renderer)
renderers.append(noisy_renderer)
renderers.append(gauss_renderer)
renderers.append(median_renderer)
# Setup viewports for the renderers.
renderer_size = 400
x_grid_dimensions = 2
y_grid_dimensions = 2
render_window = vtkRenderWindow()
render_window.SetSize(
renderer_size * x_grid_dimensions, renderer_size * y_grid_dimensions)
for row in range(0, y_grid_dimensions):
for col in range(x_grid_dimensions):
index = row * x_grid_dimensions + col
# (xmin, ymin, xmax, ymax)
viewport = [float(col) / x_grid_dimensions, float(y_grid_dimensions - (row + 1)) / y_grid_dimensions,
float(col + 1) / x_grid_dimensions, float(y_grid_dimensions - row) / y_grid_dimensions]
renderers[index].SetViewport(viewport)
render_window.AddRenderer(renderers[index])
render_window.SetWindowName('MedianComparison')
render_window_interactor = vtkRenderWindowInteractor()
style = vtkInteractorStyleImage()
render_window_interactor.SetInteractorStyle(style)
render_window_interactor.SetRenderWindow(render_window)
# The renderers share one camera.
render_window.Render()
renderers[0].GetActiveCamera().Dolly(1.5)
renderers[0].ResetCameraClippingRange()
for r in range(1, len(renderers)):
renderers[r].SetActiveCamera(renderers[0].GetActiveCamera())
render_window_interactor.Initialize()
render_window_interactor.Start()
def get_program_parameters():
import argparse
description = 'Comparison of Gaussian and Median smoothing for reducing low-probability high-amplitude noise.'
epilogue = '''
'''
parser = argparse.ArgumentParser(description=description, epilog=epilogue,
formatter_class=argparse.RawDescriptionHelpFormatter)
parser.add_argument('filename', help='FullHead.mhd.')
args = parser.parse_args()
return args.filename
def add_shot_noise(input_image, output_image, noise_amplitude, noise_fraction, extent):
shot_noise_source = vtkImageNoiseSource()
shot_noise_source.SetWholeExtent(extent)
shot_noise_source.SetMinimum(0.0)
shot_noise_source.SetMaximum(1.0)
shot_noise_thresh_1 = vtkImageBinaryThreshold()
shot_noise_thresh_1.SetInputConnection(shot_noise_source.GetOutputPort())
shot_noise_thresh_1.SetThresholdFunction(vtkImageBinaryThreshold.THRESHOLD_UPPER)
shot_noise_thresh_1.SetLowerThreshold(1.0 - noise_fraction)
shot_noise_thresh_1.ReplaceInOn()
shot_noise_thresh_1.ReplaceOutOn()
shot_noise_thresh_1.SetInValue(0)
shot_noise_thresh_1.SetOutValue(noise_amplitude)
shot_noise_thresh_2 = vtkImageBinaryThreshold()
shot_noise_thresh_2.SetInputConnection(shot_noise_source.GetOutputPort())
shot_noise_thresh_2.SetThresholdFunction(vtkImageBinaryThreshold.THRESHOLD_UPPER)
shot_noise_thresh_2.SetLowerThreshold(noise_fraction)
shot_noise_thresh_2.ReplaceInOn()
shot_noise_thresh_2.ReplaceOutOn()
shot_noise_thresh_2.SetInValue(1.0 - noise_amplitude)
shot_noise_thresh_2.SetOutValue(0.0)
shot_noise = vtkImageMathematics()
shot_noise.SetInputConnection(0, shot_noise_thresh_1.GetOutputPort())
shot_noise.SetInputConnection(1, shot_noise_thresh_2.GetOutputPort())
shot_noise.SetOperationToAdd()
add = vtkImageMathematics()
add.SetInputData(0, input_image)
add.SetInputConnection(1, shot_noise.GetOutputPort())
add.SetOperationToAdd()
add.Update()
output_image.DeepCopy(add.GetOutput())
if __name__ == '__main__':
main()